 Hyperbolic navigation systems Hyperbolic navigation systems
Hyperbolic navigation systems Hyperbolic navigation systems
Introduction
These days we take accurate satellite assisted navigation for granted.
The basis for GPS navigation was introduced in the seventies.
However long before that there already where multiple land based systems that enabled accurate position determination independent on meteorological conditions.
Electronic navigation
During the second world war obviously accurate navigation independent of the weather for both aircraft and ships where needed.
Multiple systems where invented on both German and allied sides where invented.
a lot of information can be found about these radio based navigation aids.
The main problem in general was that these systems enabled a craft to find a specific target
rather than offer a general fix.
This enabled the British to jam the German system and redirect their bombers to a harmless bomb release area.
Hyperbolic systems
While preparing for D-Day it was determined that a system was needed to provide generic position independent electronic navigation.
These systems where based on hyperbolic navigation.
nThis line nears the Y-axis where X is close to zero and nears the X-axis for high values of X,
while both sides never actually touch the X or Y axis.
Also a mirror image of this line can be found on the other side of the center position of the axis system.
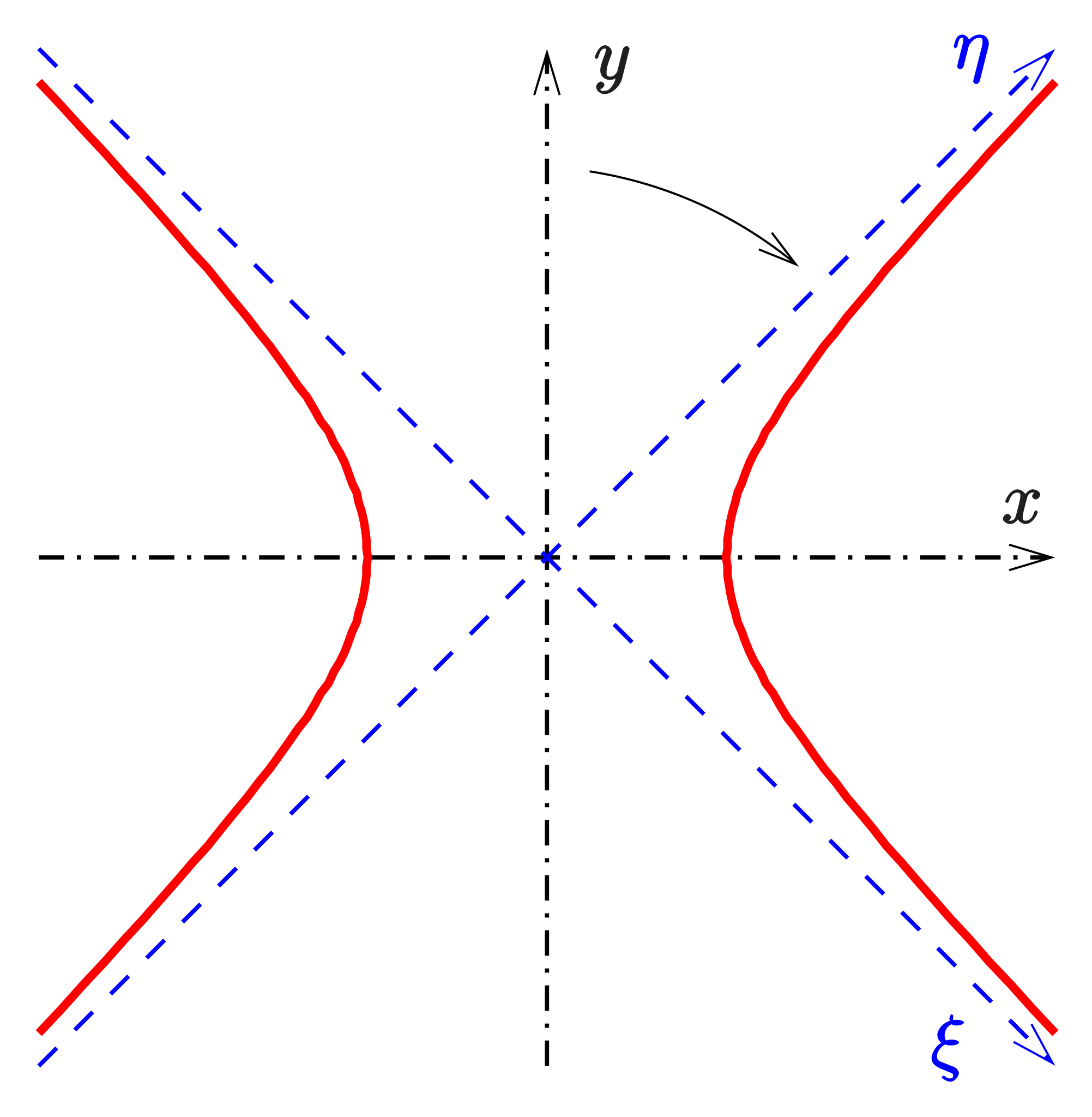 Example of a hyperbole (source Wikipedia)
Example of a hyperbole (source Wikipedia)
The hyperbolic navigation principle
Whenever two radio transmitters located on a descent distance from each other transmit a signal on exactly the same time,
the observer in the middle of the two stations will detect both signals at the same time and such recognize only one signal.
This behavior goes for multiple points between the two stations forming a hyperbolic line as well as its counterpart.
While diverting from this line the two separate signals will be detected though one does not know which of the signals came from which station.
Though the positions with the same time difference between the signals again form a hyperbolic line and it's counterpart.
If at least two measurements are done using a different pair of stations (which would require at least three stations) the navigator can determine his exact position by locating the line of time difference on a special map and find where they intersect.
DECCA
Although multiple concepts came from both the United States as well as from Britain,
it was the British company DECCA (the one from the records) that got the concession to
develop and build a navigational system to be ready before D-Day.
These developments needed to be done en tested in deep secret to prevent the Germans to detect the system
and develop counter measures.
This still would be difficult as due to the nature of the system it had existed of a unmodulated carrier
that provided no information at all.
DECCA did not come up with a pulse system but opted for a continuous carrier on multiple frequencies.
A reference signal in 14kHz was used in a transmitter called 'Master' or 'Black', this was multiplied six times resulting in a carrier of 84kHz.
Two more (and a third later) slave stations received the signal resolved the 14kHz using a phase-locked loop
and multiplied the signal by nine for the 'Green' slave , by eight for the 'Red' slave and by five for the 'Purple' slave station.
On the vessel these signals where received and multiplied to 420kHz providing three signals with a constant phase depending on the position.
If the ship would move the phases would shift which was counted by converter 'mileage' counters from gasometer systems (DECCA used technology available in a short notice).
Using specials maps the position was easily determined by reading the counters and find their values on the map.
The accuracy at the time was about 300 Meter far enough as required for the D-Day operations.
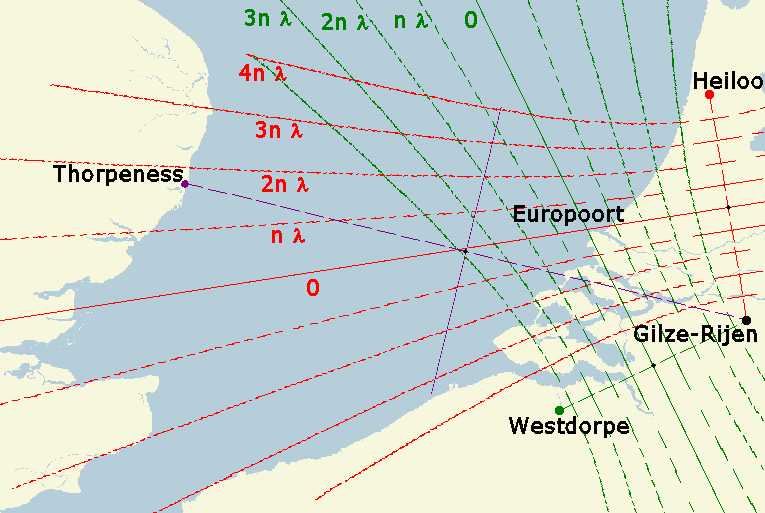 Principle of a DECCA navigation map (Source: Wikipedia)
Principle of a DECCA navigation map (Source: Wikipedia)
DECCA was still in use as a commercial service until the nineties when more and more people used cheap and small microprocessor devices in stead of the bulky expensive devices for which had to be subscribed. Multiple modifications to the system where done to discourage unauthorized use but eventually these modifications only improved the quality of the 'pirating' devices. For this reason and being an important part of the infrastructure, DECCA has been supported long by governments but it used became to niche ans such expensive to keep it available. Equipment still can be found on sites like eBay regularly but has only value for collectors.
RAYTRON
A system using a similar concept like DECCA was RAYTRON developed in the late forties.
It used a modulated carrier offering a one and half to three meter accuracy up to a distance of about 600km from shore.
Unfortunately i haven't been able to find any more documentation regarding this system.
LORAN-C
During the fifties the development of the LON-RAnge-Navigation was done.
The system initially used a chain of medium wave transmitters that produced a chain of pulses.
The devices where bulky and expensive and therefore mainly used by the NAVY.
When technology progressed LORAN-C was developed and a lot of the old now called LORAN-A devices came available on the surplus market and where greatly used on board fishing boats.
The main difference between the systems where the used frequencies as well as the pulse repetition rates.
All LORAN-C stations operated on 100kHz and used a carefully thought over system of multiple ground stations providing almost worldwide navigation aids.
Using modern microprocessors LORAN-C became even available in small private aircraft's.
For a long time it has been tried to keep LORAN-C available.
New developments called LORAN-E or Euro-Fix should bring the system into the future but in 2015 the familiar chirps on 100kHz gradually disappeared.
LORAN devices are easy to find on sites like eBay but again their value is only for collectors.
CHAYKA (чайка)
Although the LORAN signal was available for everyone, the Soviet Union decided to roll-out a similar system called CHAYKA or seagull.
The repetition frequencies where chosen carefully to prevent interference to the LORAN system.
There is not much information available on CHAYKA, it's current status is unclear and equipment is difficult to find.
Omega
At the end of the sixties the Omega navigational system was introduced.
It used a limited amount of transmitter stations on 10 kHz to 14 kHz providing worldwide navigation,
even available to submarines.
By using a four tone pattern each ten seconds one could determine his accurate position within a few steps.
It's worldwide availability made it widely used for aviation.
Omega was a collaboration between the USA, Argentine, Norway, Liberia, France, Japan en Australia,
which was required to enable worldwide coverage.
However in 1997 this cooperation seized, the system was found to be to expensive
and by then most users had changed over to GPS navigation.
I haven't been able to find a Omega device yet,
My only experience was long ago during my time in aviation.
ALPHA (АЛЬФАЙ)
Of course the Soviet Union required a system similar to Omega.
The chosen frequencies where around 11 kHz to 15 kHz.
Not much is known about the ALPHA system, most transmitters have been decommissioned
but some still where available a few years ago.
It's still on my bucket list to figure this out.
 ALPHA control unit in a Tu154 aircraft
ALPHA control unit in a Tu154 aircraft
GPS
Although GPS is not a terestial navigational system, it sure used the concept of hyperbolic navigation.
Adding an extra dimension it also requires at least four stations (satellites) to determine your position.
By smart coding the signals, like Omega it is possible to resolve the position without any previous reference.
The user-friendly-ness and low price of the GPS-devices have attributed to the end of land based navigational systems.
A long debate has been taken place whether this was a smart thing to do,
but eventually economics driven governments opted for a single dependence.
More information on hyperbolic navigation systems
For this online Dutch magazine an wrote a article regarding this subject.
DARU magazine
The excellent website of Jerry Proc VE3FAB which was a lot of help for my experiments.
jproc.ca/hyperbolic
On this site my experiments with some vintage equipment.
CoolLabs
Usefull information regarding the Loran system can be found here.
www.loran-history