 DECCA Plotters DECCA Plotters
DECCA Plotters DECCA Plotters
Type 331
I was lucky to find a DECCA Type 331 plotter.
The device was incomplete and no documentation nor required connectors were avaiable.
I had to figure out a way to drive them.
This is how i did it.
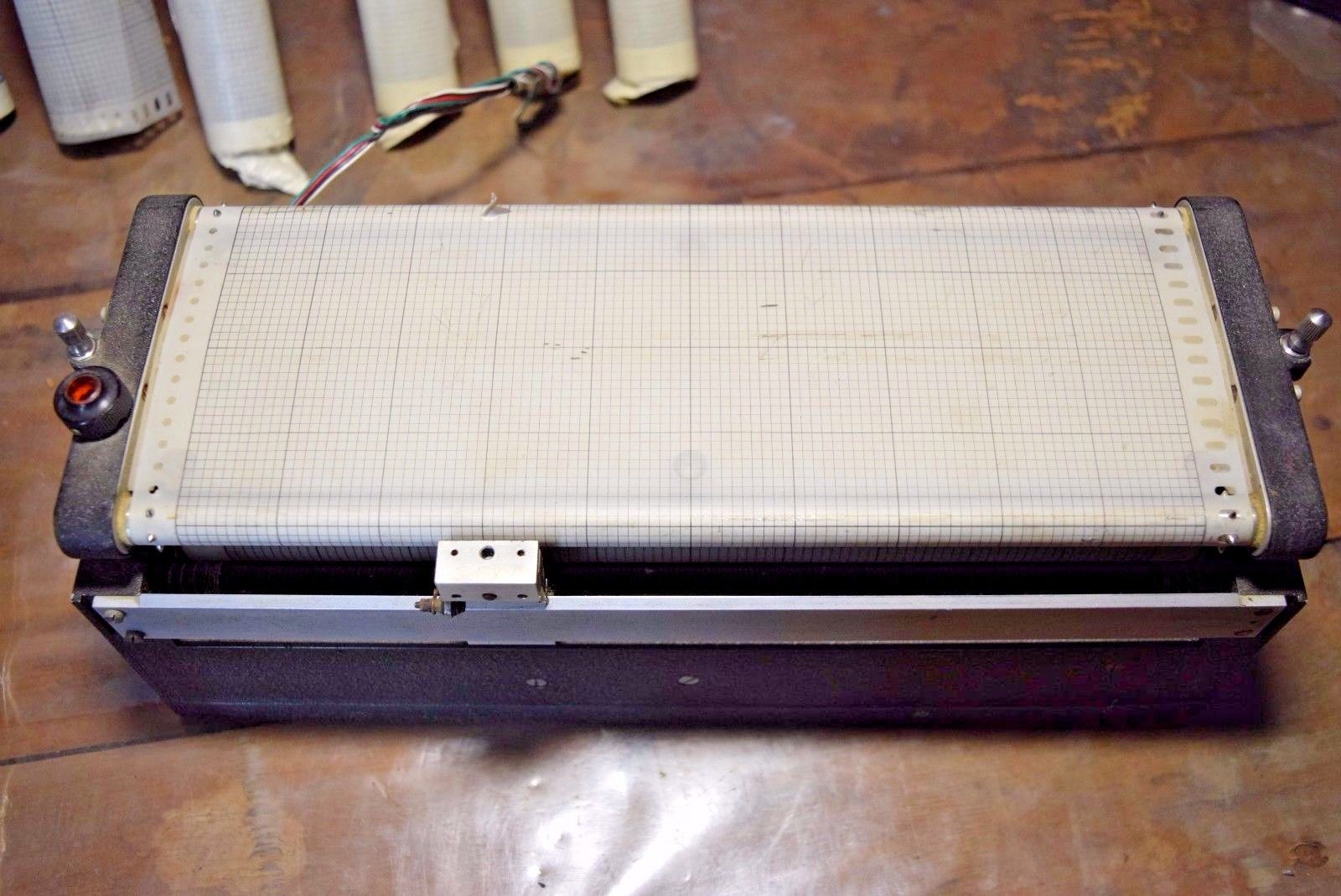 Type-331 plotter as i bought it from EBay
Type-331 plotter as i bought it from EBay
To drive the plotter i develloped some electronics using cheaply available and easy to use Arduino hardware. For the microcontroller i develloped a realtime multitasking scheduler, such that all the required tasks to run the motors do the Lat/Long calculations and the communication with other hardware could run independendly. The motors are driven by two DC-amplifiers while the position feedback is done using Analog to Digital converters. It's not perfect but it is what was posible with the condition the 331 unit was in.
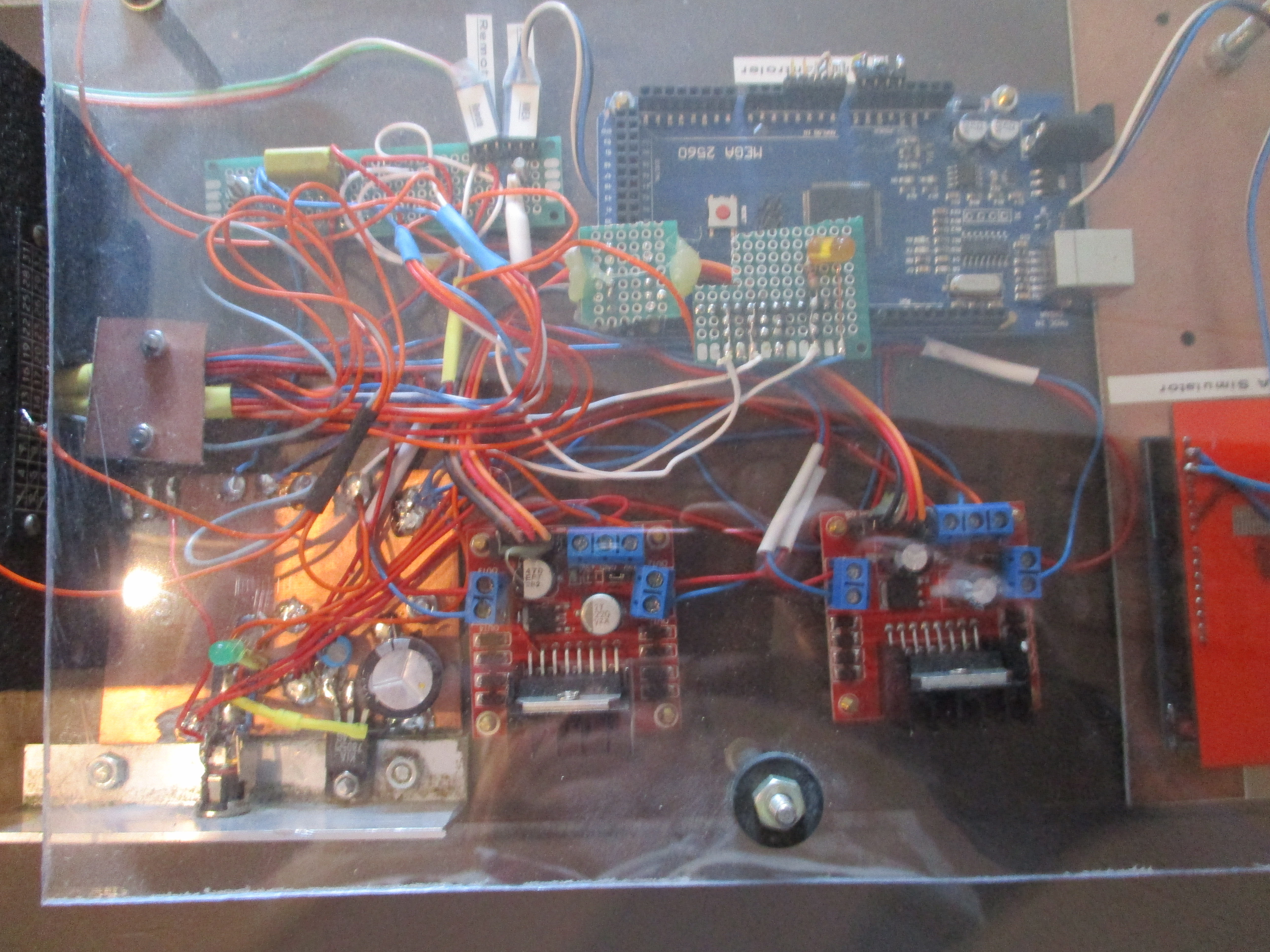 The complete controller hardware
The complete controller hardware
To initialy align and test the the plotter i made a remote controller again using Arduino hardware Once running the unit receives position data from a GPS receiver or another Arduino spitting out NMEA data.
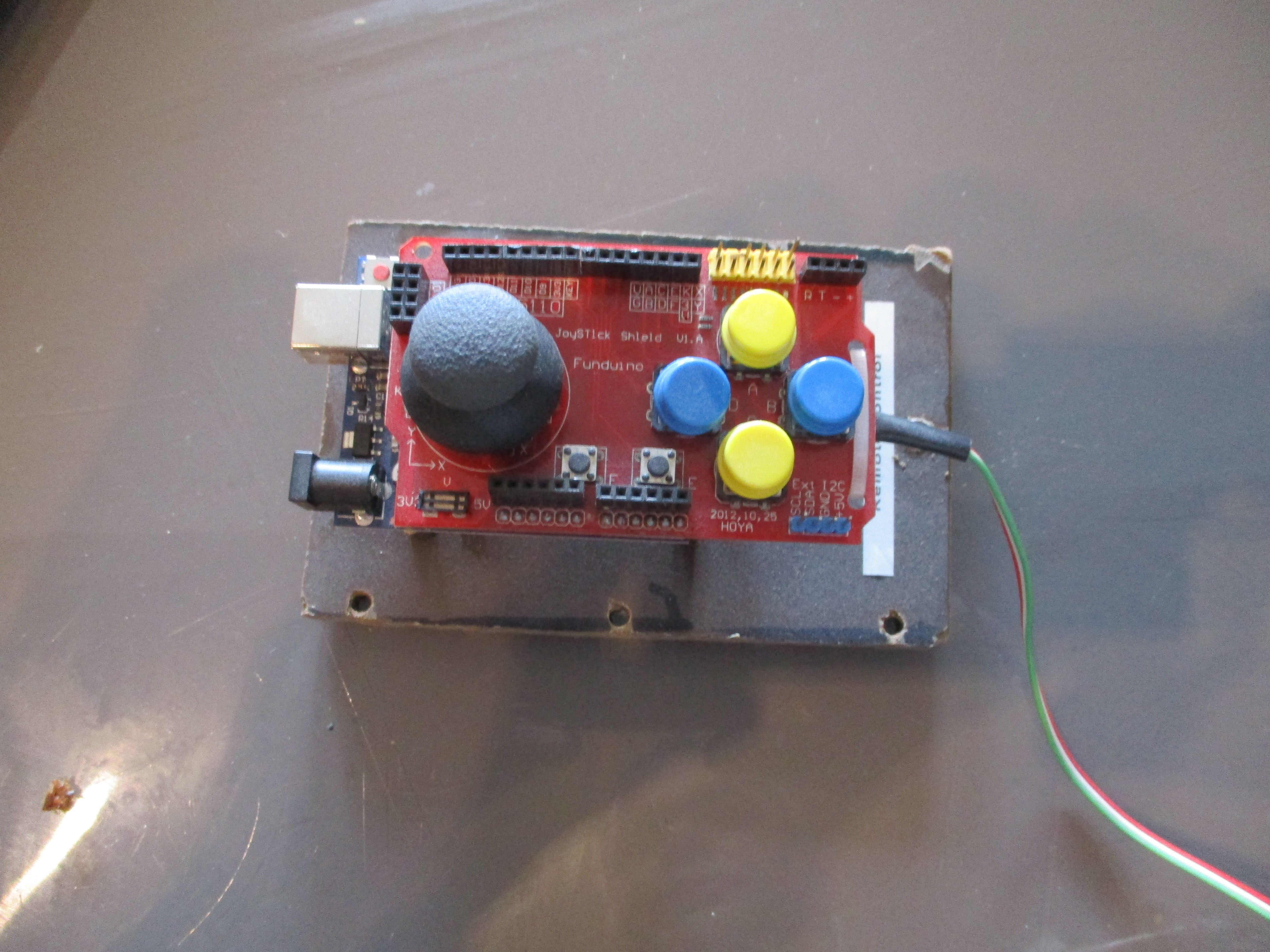 The detachable remote controller
The detachable remote controller
Althoug due to the limmitations of the plotter feedback not in a verry high resolution eventualy the system actualy was able to produce some navigational results.
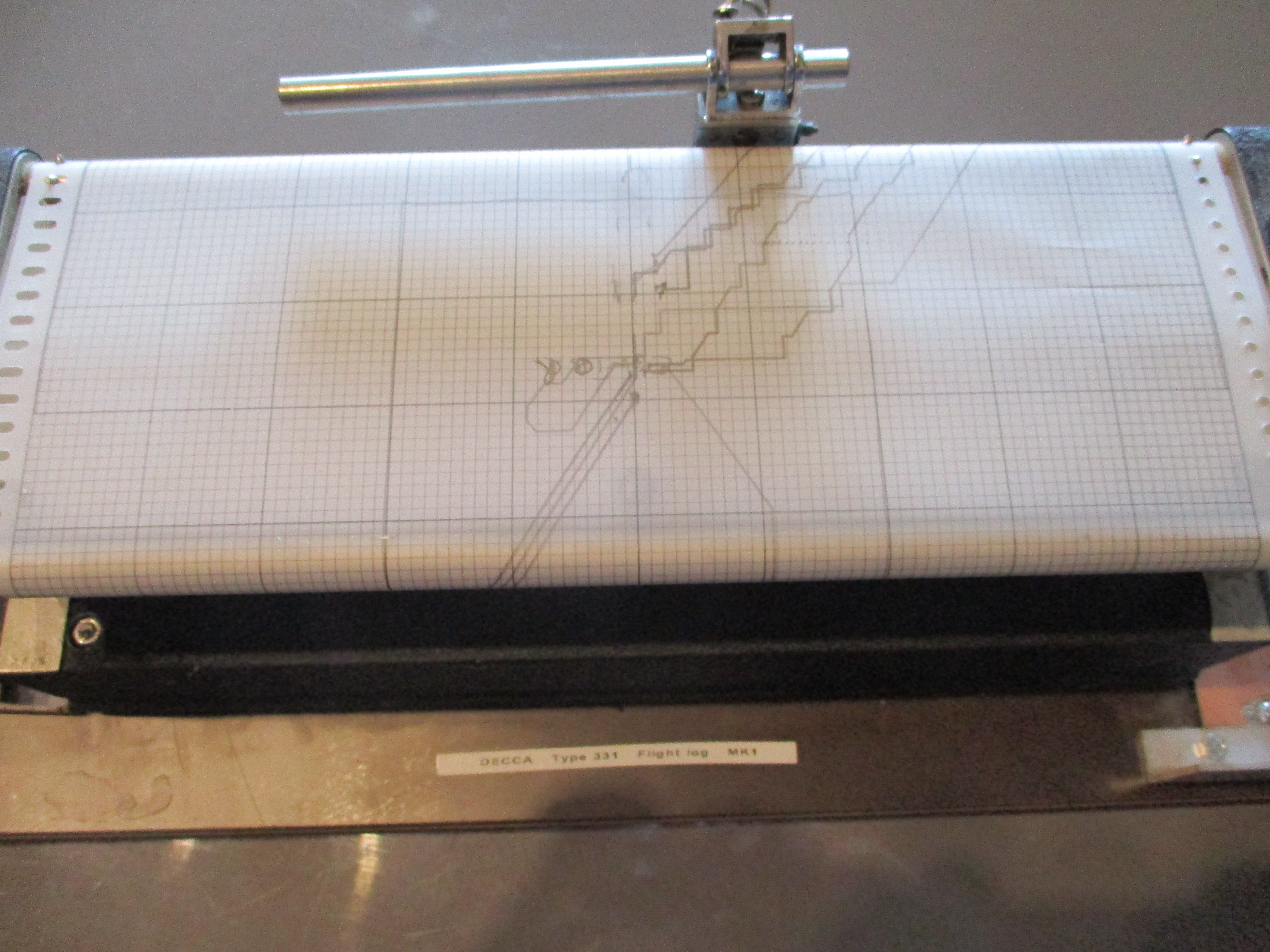 The first plot results
The first plot results
I build the whole experiment on a wooden board such it can be demonstrated on home brew demonstration events.
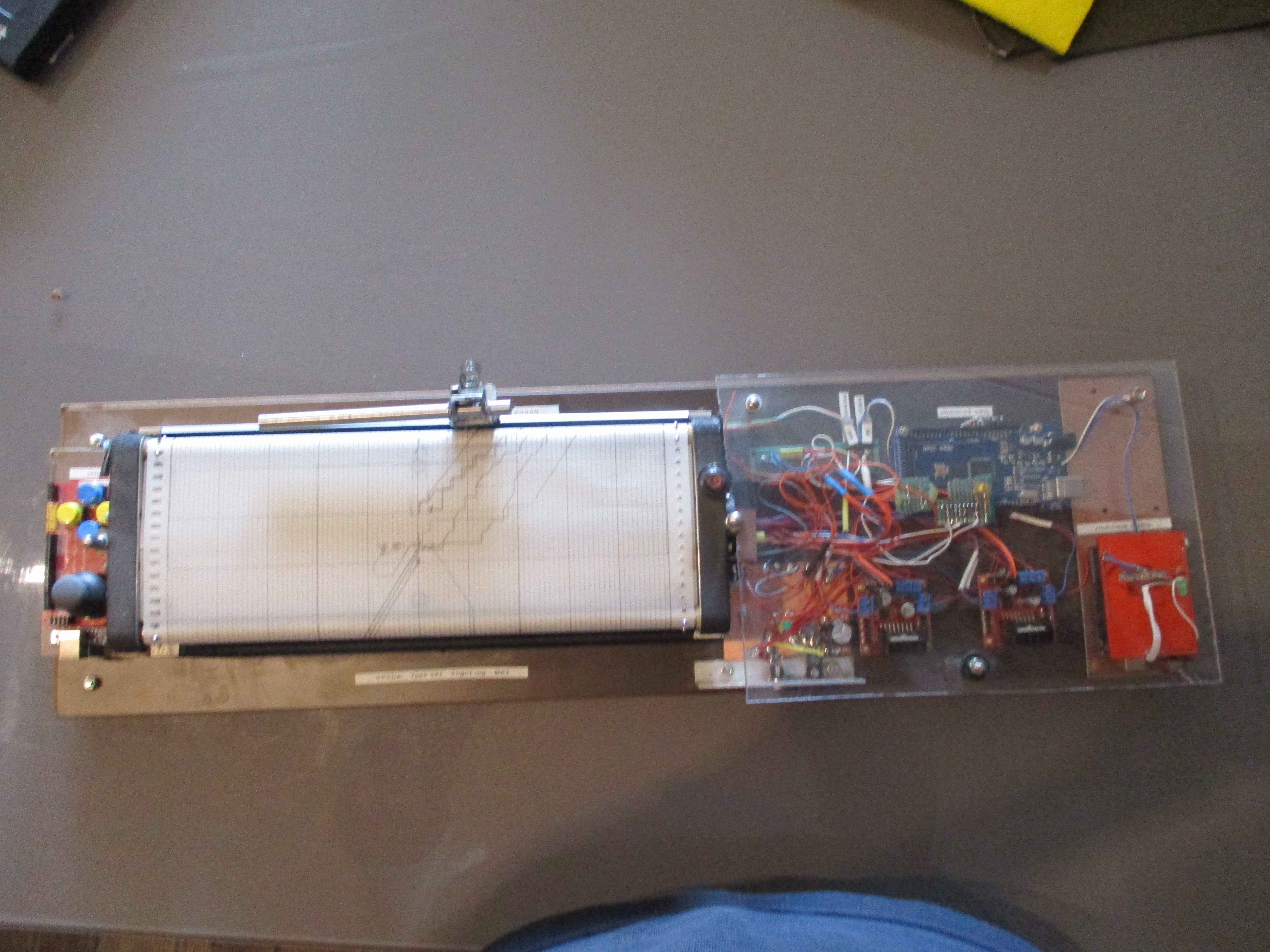 An impression of the complete experiment
An impression of the complete experiment
Type 961
Two fair complete units of Type 961 are in my possesion.
They just need fairly standard DB25 connectors to hookup.
Thoug like the previous unit i have to reverse engineer how to drive them.
 Type-961 plotter
Type-961 plotter
More information
I wrote this article originaly for a Dutch online magazine which can be found here:
DARU #31